УДК 681.518.3
Современные решения и подходы к телемеханизации объектов линейной части
В. В. БУЦ – к.т.н., ПАО «Газпром» (Москва, Россия), V.Buts@adm.gazprom.ru
К. Г. САВЕНКОВ – ПАО «Газпром», K.Savenkov@adm.gazprom.ru
А. В. РОЩИН – к.т.н., АО «АтлантикТрансгазСистема» (Москва, Россия), rav@atgs.ru
С. А. ЛАВРОВ – АО «АтлантикТрансгазСистема», lavrov@atgs.ru
Системы линейной телемеханики играют ключевую роль в обеспечении надежности и безопасности газотранспортных систем. В статье представлены современные технические решения по структурной, технической и функциональной реализации системы линейной телемеханики магистральных газопроводов, которая представляет собой территориально-распределенную двухуровневую автоматизированную систему управления, предназначенную для телемеханизации линейных объектов производственно-технического комплекса ПАО «Газпром». Особое внимание уделяется применению современных каналов связи, обеспечивающих передачу информации между уровнями системы линейной телемеханики, а также роли контролируемого пункта как коммуникационного узла, обеспечивающего сбор информации с первичных цифровых приборов и систем и передачу ее на пункт управления. В статье приведены технические решения как по электрифицированным контролируемым пунктам телемеханики, так и по неэлектрифицированным пунктам с возобновляемыми источниками питания на базе солнечных батарей. В заключении указывается, что использование современных программно-технических средств позволяет создавать принципиально новые системы линейной телемеханики, способные эффективнее выполнять поставленные задачи.
Ключевые слова: система линейной телемеханики, контролируемый пункт телемеханики, неэлектрифицированный контролируемый пункт телемеханики, каналы передачи данных, возобновляемый источник питания
Обеспечение безопасного функционирования магистральных газопроводов является одной из приоритетных задач ПАО «Газпром». Требуемый уровень надежности и безопасности газотранспортных систем осуществляется за счет их телемеханизации. Системы линейной телемеханики (СЛТМ) обеспечивают непрерывный автоматический контроль за объектами линейной части газотранспортной системы, дистанционное автоматизированное управление линейными объектами, а также идентификацию и локализацию аварий на газопроводах.
Современные решения и подходы к телемеханизации объектов линейной части представлены на примере системы линейной телемеханики, выполненной на базе программно-технических средств российского производства и полностью соответствующей требованиям ПАО «Газпром», предъявляемым к системам автоматизации линейных объектов [1].
Объекты телемеханизации
Системы линейной телемеханики применяются на следующих производственно-технологических объектах комплекса транспортировки газа [2]:
- крановые узлы на линейной части магистральных газопроводов, на перемычках между нитками газопроводов, на газопроводах-отводах и речных (дюкерных) переходах;
- переходы магистрального газопровода через железнодорожные пути, автомобильные дороги, естественные и искусственные препятствия;
- узлы запуска и приема внутритрубных устройств;
- узлы редуцирования газа на магистральных газопроводах (УРГ);
- газораспределительные станции (ГРС);
- газоизмерительные станции (ГИС);
- системы энергоснабжения производственно-технологических объектов линейной части магистральных газопроводов, газопроводов-отводов, продуктопроводов и межпромысловых коллекторов газовых месторождений;
- станции катодной защиты, расположенные на производственно-технологических объектах линейной части магистральных газопроводов, газопроводов-отводов, продуктопроводов и межпромысловых коллекторов газовых месторождений.
Задачи системы линейной телемеханики
Благодаря информации, предоставляемой СЛТМ, персонал газотранспортной организации может обеспечить безопасное и эффективное управление технологическим процессом транспортировки газа с возможностью непрерывного контроля технологических параметров и оперативного реагирования в штатных и нештатных ситуациях, а также снизить возможный ущерб за счет предотвращения аварийных ситуаций и оперативной локализации аварийных участков на линейной части газопроводов.
Структура СЛТМ
Система линейной телемеханики представляет собой территориально-распределенную двухуровневую автоматизированную систему управления. На верхнем уровне СЛТМ осуществляется дистанционный контроль и управление технологическим оборудованием, организация человеко-машинного интерфейса, накопление информации о ходе технологического процесса и действиях оперативного персонала. Верхний уровень состоит из пункта управления (ПУ ТМ) и, в ряде случаев, промежуточных пунктов управления (ППУ ТМ), предназначенных для управления обособленными группами линейных объектов [3]. На нижнем уровне СЛТМ выполняется сбор, первичная обработка и передача информации по каналу связи на верхний уровень СЛТМ, а также формирование управляющего воздействия на исполнительные устройства по командам, поступающим с верхнего уровня СЛТМ. Нижний уровень СЛТМ состоит из контролируемых пунктов телемеханики (КП ТМ) и систем автоматического управления (САУ) оборудованием производственно-технологического объекта.
Необходимо отметить, что построение системы линейной телемеханики в большой степени определяется структурой и средствами технологической связи, обеспечивающими передачу информации между уровнями СЛТМ [3]. Также технологическая связь накладывает ограничения на такие технические характеристики СЛТМ, как объем телемеханизации и быстродействие. Если в первых СЛТМ для передачи данных между верхним и нижним уровнями применялись модемы и радиомодемы, обеспечивающие скорость передачи данных не более 9,6 кбит/с, то в настоящее время основной средой передачи данных стали локальные вычислительные сети (ЛВС), использующие транспортный протокол TCP/IP. Поэтому основными каналами передачи данных в современных системах телемеханики стали следующие:
- волоконно-оптические линии связи (ВОЛС);
- системы широкополосного беспроводного доступа (ШПД);
- спутниковые каналы связи.
Широкое распространение вычислительных сетей позволило не только значительно увеличить объем и скорость передачи данных между КП ТМ и ПУ ТМ, но также использовать все возможные методы резервирования каналов передачи данных, применяемые в локальных и глобальных вычислительных сетях.
Типовая структура современной СЛТМ представлена на рис. 1.
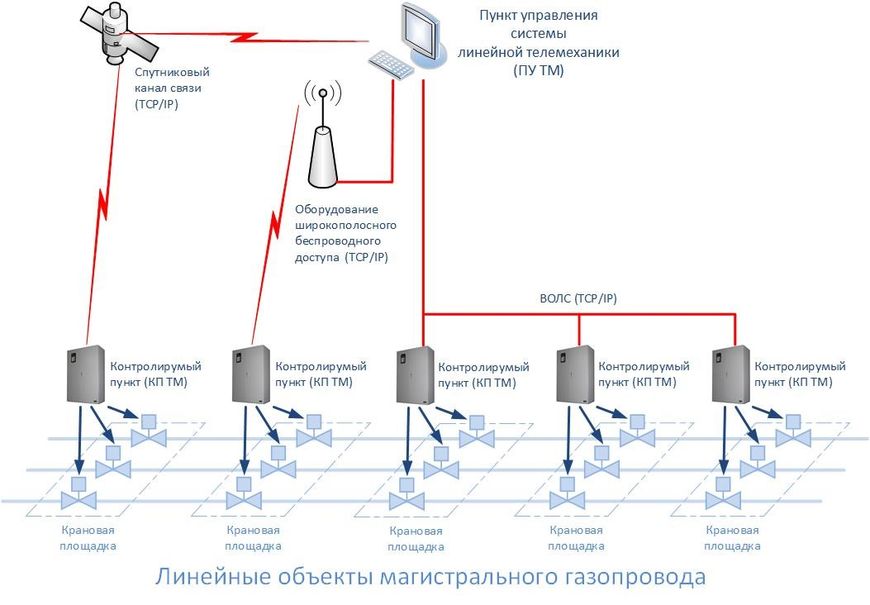
Рис. 1. Структура системы линейной телемеханики
Контролируемый пункт
Контролируемый пункт современной СЛТМ, кроме стандартных функций доставки информации от аналоговых и дискретных датчиков и передачи команд телеуправления, обеспечивает контроль достоверности получаемой информации от контрольно-измерительных приборов и автоматики (КИПиА), диагностику нештатных ситуаций по косвенным признакам, автоматическое управление технологическим оборудованием по сложным алгоритмам, управление системой коррозионной защиты трубопровода, управление системой энергоснабжения, охранную сигнализацию объекта и многое другое. Рассматриваемый КП СЛТМ может выполнять алгоритмы управления любой сложности, что позволяет реализовать систему автоматического управления ГРС и ГИС на тех же программно-технических средствах. Такое решение представлено на рис. 2. Оно обеспечивает бесшовную интеграцию САУ ГРС и САУ ГИС в систему линейной телемеханики газотранспортного предприятия и позволяет получать с уровня ПУ ТМ доступ к информации о расходе и физико-химических свойствах газа в режиме реального времени, чтение архивов данных, недоступных ранее, а также выполнение дистанционной диагностики оборудования САУ ГРС и САУ ГИС.
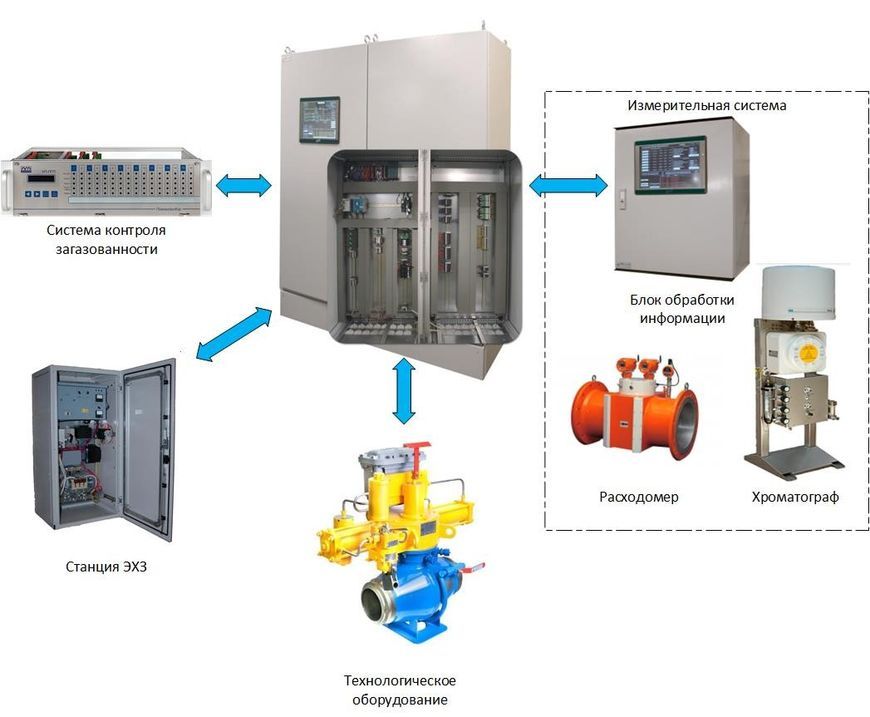
Рис. 2. САУ ГРС с функцией КП ТМ
В настоящее время основной объем информации в системе линейной телемеханики генерируется устройствами и системами, оснащенными собственными микропроцессорными системами управления и передающими информацию по цифровым интерфейсам. Цифровые интерфейсы имеют регуляторы, станции катодной защиты, автоматические пункты секционирования, счетчики электроэнергии и т. д. Во многих случаях эти устройства несовместимы друг с другом и КП СЛТМ становится коммуникационным центром, обеспечивающим сбор информации со всех интеллектуальных приборов и передачи ее на пункт управления, как показано на рис. 3.
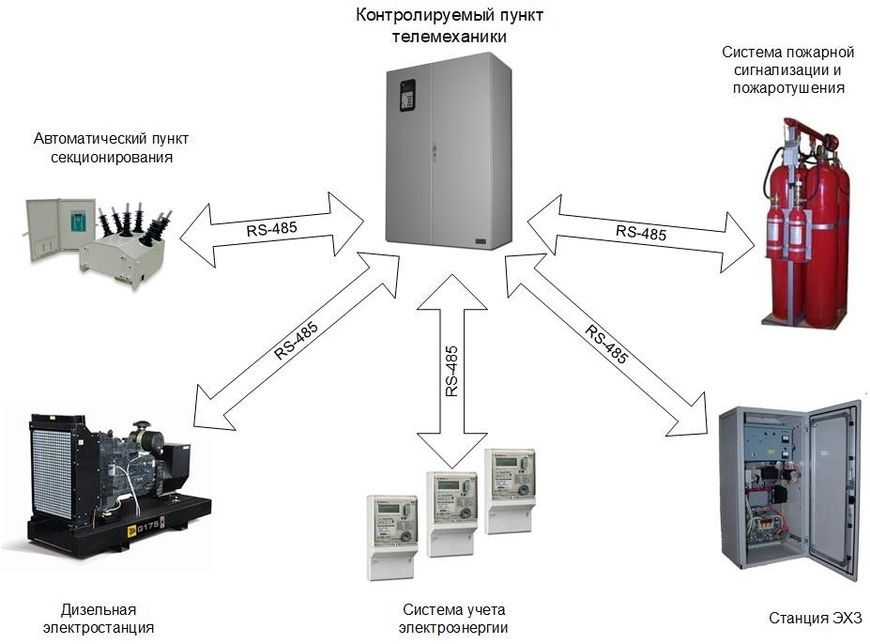
Рис. 3. Подключение внешних систем к КП ТМ
Срок службы современной системы линейной телемеханики составляет 15 лет. За это время многое может измениться: технологическое оборудование, приборы КИПиА, системы энергоснабжения и т. п. Применение технологических языков программирования в соответствии со стандартом МЭК 61131-3 (IEC 61131-3) [4] для создания программного обеспечения контролируемых пунктов позволяет организовать его сопровождение и доработку силами эксплуатирующей организации для реализации новых функций, а также для подключения дополнительного оборудования.
Электрифицированные и автономные КП ТМ
Техническая реализация КП ТМ определяется условиями эксплуатации программно-технических средств, развитостью инфраструктуры линейных объектов, технологическими решениями построения линейных объектов и другими факторами.
Традиционные проектные решения по телемеханизации линейных объектов магистральных газопроводов предусматривают их электрификацию. В этом случае КП ТМ получает электропитание от централизованных источников электроэнергии (трансформаторных подстанций, блочно-комплектных электростанций и др.), как показано на рис. 4.

Рис. 4. Блок-бокс электрифицированного КП ТМ
В ряде случаев подвод электроэнергии к производственным площадкам телемеханики выполнить невозможно, например, при расположении КП ТМ на особо охраняемых природных территориях. В других случаях подвод электроэнергии к производственным площадкам является экономически нецелесообразным. Для таких объектов используются КП ТМ с возобновляемыми источниками электропитания (ВИЭ). Благодаря надежности и простоте эксплуатации наибольшую популярность получили ВИЭ на базе солнечных батарей. Низкое энергопотребление современных систем линейной телемеханики позволяет с помощью солнечных батарей обеспечивать электропитание контролируемых пунктов, контрольно-измерительных приборов и исполнительных устройств даже на многониточных магистральных газопроводах, как показано на рис. 5.

Рис. 5. КП ТМ с ВИЭ для многониточного магистрального газопровода
Для однониточного магистрального газопровода или газопровода-отвода контролируемый пункт может быть выполнен в виде шкафа, предназначенного для установки на открытых площадках, и размещен в периметре крановой площадки, как показано на рис. 6. Данное решение наиболее популярно в густонаселенных районах, т.к. не требует землеотвода для установки КП ТМ. В большинстве случаев в периметре крановой площадки удается выделить невзрывоопасную зону, в которой можно разместить КП ТМ в общепромышленном исполнении. При ограниченных размерах крановой площадки, в которой вся ее площадь является взрывоопасной зоной, применяются автономные КП ТМ во взрывозащищенном исполнении.

Рис. 6. КП ТМ с ВИЭ в периметре крановой площадки
Для передачи информации между автономными КП ТМ и ПУ ТМ применяются беспроводные каналы связи: радиоканал УКВ или канал мобильной связи (GSM). Контролируемые пункты телемеханики предназначены для эксплуатации в жестких условиях при температуре окружающей среды до -40°С, а в некоторых случаях и до -50°С, что особенно важно для КП ТМ с ВИЭ, на которых невозможно обеспечить обогрев оборудования даже в штатных режимах работы [5].
Контроль загазованности переходов магистральных газопроводов через автомобильные и железные дороги
Частным случаем автономного КП ТМ является контролируемый пункт на переходе магистрального газопровода через автомобильную или железную дорогу, предназначенный для оперативного выявления утечек газа в местах пересечения магистрального газопровода с транспортной инфраструктурой. Выявление утечки газа выполняется путем постоянного измерения концентрации метана в вытяжной свече, установленной на защитном футляре в месте пересечения магистрального газопровода с автомобильной или железной дорогой, как показано на рис. 7. В связи с отсутствием электроснабжения, а также выделенных участков земли для установки полноценного КП ТМ с ограждением и техническими средствами охраны, для контроля загазованности переходов получили распространение специализированные контролируемые пункты, имитирующие технологическое оборудование и устанавливаемые непосредственно на вытяжной свече (см. рис. 8).
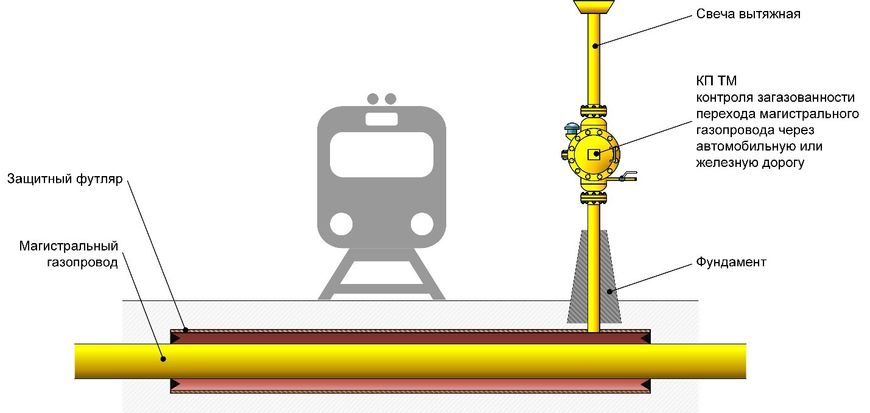
Рис. 7. Контроль загазованности перехода магистрального газопровода через автомобильную или железную дорогу

Рис. 8. КП ТМ контроля загазованности перехода, установленный на вытяжной свече
КП ТМ контроля загазованности переходов имеет сверхнизкое энергопотребление и питается от встроенного аккумулятора, рассчитанного на работу в течение года без подзарядки. Измерение концентрации метана выполняется постоянно и при превышении установленного порога по каналу GSM на пункт управления передается аварийное сообщение. Для контроля работоспособности КП ТМ по расписанию один раз в сутки передает на ПУ ТМ сведения о своем состоянии.
Пункт управления
На пункте управления системы телемеханики решаются следующие задачи:
- сбор, обработка и отображение параметров линейной части, САУ ГРС, ГИС, УРГ в режиме реального времени;
- дистанционное управление и регулирование;
- контроль значений параметров, аварийная сигнализация;
- сбор и хранение архивов, построение трендов;
- создание отчетов;
- информационный обмен с вышестоящей системой оперативно-диспетчерского управления.
Для обеспечения надежности на ПУ ТМ выполняется резервирование серверов, жестких дисков, сетевых интерфейсов. С целью контроля работоспособности проводится мониторинг программно-технических средств (загрузки процессора, заполненности жестких дисков, объема используемой памяти и т. п.), а также мониторинг каналов связи.
Для выявления на ранних этапах нештатных ситуаций на ПУ ТМ реализованы следующие дополнительные функции:
- по состоянию кранов и значению давления производится расчет состояния участков линейной части «в работе», «остановлен (под газом)», «остановлен (без газа)», «авария». Вручную участок может быть переведен в состояние «проводятся плановые работы». Состояние участков отображается цветом на видеокадре, что позволяет избежать ошибок при переключении запорной арматуры как в ходе плановых работ, так и в процессе локализации аварийного участка;
- предупредительные уставки давлений и температур по линейной части и входам ГРС подстраиваются к текущему значению параметров в режиме «одной кнопки». Это позволяет использовать узкий коридор предупредительных уставок (например, ± 0.1 МПа, ± 2°С), немедленно оповещать диспетчера о любом изменении режима газотранспортной системы;
- система выявления нештатных ситуаций анализирует принимаемые параметры по линейной части на допустимость. Например, неравенство давлений газа до и после крана при открытом кране, выход разницы давлений в начале и в конце участка магистрального газопровода за установленную величину и т.д. При невыполнении соотношений сообщение о наличии проблемы направляется эксплуатационному персоналу.
Вычислительная мощность и высокая надежность современного ПУ ТМ позволяет использовать его в качестве полноценной системы диспетчерского контроля и управления филиала, исключив промежуточный уровень ПУ линейного объекта, как показано на рис. 9. Такое решение позволяет сократить эксплуатационные затраты, увеличить быстродействие системы диспетчерского контроля и управления и в большинстве случаев повысить надежность управления производственно-технологическим комплексом.

Рис. 9. Пункт управления системы линейной телемеханики
Новые тенденции
Развитие высокоскоростных сетей связи и широкое распространение протокола TCP/IP в качестве стандартного протокола транспортного уровня позволило совмещать в одном канале связи данные, передаваемые по разным протоколам. Это в значительной мере меняет концепцию СЛТМ как системы, состоящей из однотипных контролируемых пунктов и пункта управления. Теперь любое устройство, применяемое на линейной части магистрального газопровода, потенциально может независимо от контролируемого пункта телемеханики передавать данные непосредственно на пункт управления. В этом случае для приема информации на ПУ ТМ возможно применение широко распространенной технологии OPC UA (Open Platform Communications Unified Architecture) [6], предоставляющей доступ к данным с помощью стандартизованных механизмов. Таким образом, система линейной телемеханики трансформируется в полноценную автоматизированную систему управления линейной частью (АСУ ЛЧ), как показано на рис. 10.
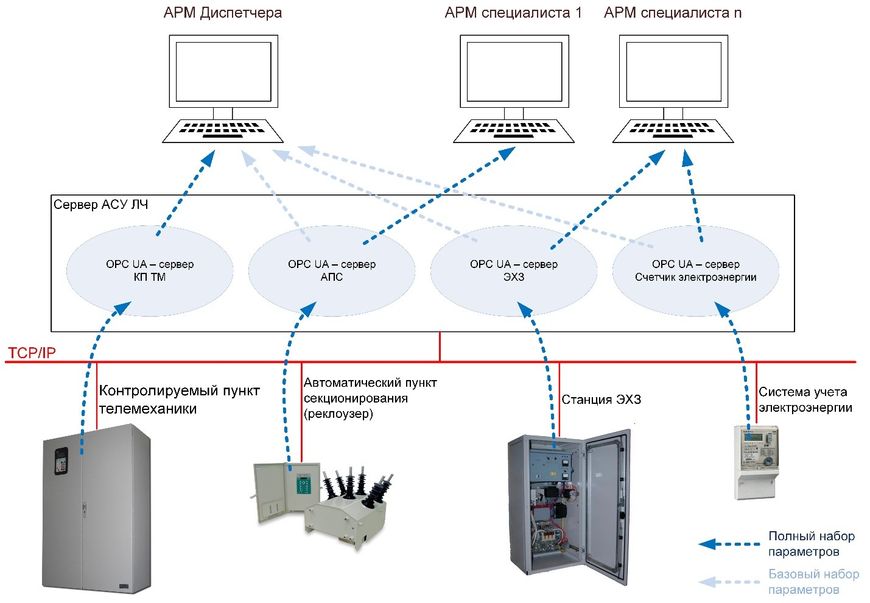
Рис. 10. Структура современной АСУ ЛЧ
Преимущества такого решения очевидны:
- обеспечивается передача на ПУ ТМ полного объема информации, предусмотренного разработчиком устройства без ограничений, накладываемых интерфейсом или протоколом КП ТМ;
- обеспечивается выполнение расширенных функций, предусмотренных производителем устройства, например, функций диагностики или передачи архивной информации, которые могут быть реализованы на автоматизированных рабочих местах (АРМ) профильных специалистов;
- снижается сложность и сокращаются сроки пусконаладочных работ за счет применения готового программного обеспечения, поставляемого вместе с устройством.
Достоинства предлагаемого решения можно наглядно продемонстрировать на примере автоматических пунктов секционирования (реклоузеров), применяемых в системе электроснабжения линейной части магистральных газопроводов. Микропроцессорная система управления, входящая в состав реклоузера, содержит значения нескольких сотен параметров. Диспетчеру линейного ПУ магистрального газопровода такой объем информации не нужен, и при передаче данных от реклоузера на пункт управления по традиционной схеме через КП ТМ все эти данные оставались невостребованными. При современном подходе весь набор параметров реклоузера может быть доставлен на ПУ ТМ и проанализирован на выделенном АРМ работниками службы электрохимзащиты с помощью специализированного программного обеспечения, поставляемого вместе с реклоузером.
Заключение
Современный уровень развития программно-технических средств позволяет создавать принципиально новые системы линейной телемеханики качественно более высокого уровня, которые могут обрабатывать в реальном времени большие объемы информации и имеют возможность интеграции в многоуровневые системы управления производственно-технологическими комплексами.
ЛИТЕРАТУРА:
- СТО Газпром 097-2011. Автоматизация. Телемеханизация. Автоматизированные системы управления технологическими процессами добычи, транспортировки и подземного хранения газа. Основные положения. М.: ООО «Газпром экспо», 2012.
- СТО Газпром 2-1.15-680-2012. Автоматизированные системы управления производственно-технологическими комплексами объектов ПАО «Газпром». Транспортировка, добыча, хранение, переработка углеводородов. Технические требования. М.: ООО «Газпром экспо», 2013.
- СТО Газпром 2-1.18-598-2011. Типовые технические требования на технологическую связь. М.: ООО «Газпром экспо», 2012.
- Рощин А.В., Тимофеев Р.Ю. СТН-3000-Р – реализация программы импортозамещения компонентов системы телемеханики СТН-3000 производства АО «АтлантикТрансгазСистема» // Автоматизация в промышленности. 2017. № 4. с. 6–8.
- Илюшин С.А., Лавров С.А. Введение систем телемеханики с возобновляемыми источниками электропитания // Автоматизация в промышленности. 2015. № 11. с. 8–12.
- Mahnke W., Leitner S. H., Damm M. OPC Unified Architecture // Springer, 2009, pp. 339
Статья в формате pdf →
- 109388, Москва,
- ул. Полбина, д. 11
- ☎ +7 (495) 660-08-02
- atgs@atgs.ru
- atgs.ru
